滋賀県草津市。工場と住宅地と田畑が混淆する、のどかな景色の中に横たわる巨大ロボット、それが株式会社人機一体の本社「秘密基地人機一体」です。株式会社人機一体(以下、人機社)では「Man-Machine Synergy Effector = 人間機械相乗効果器」のコンセプトのもと、先端ロボット工学技術の社会実装を目指して人型重機をはじめとする操縦型の大型ロボット関連技術の研究開発に取り組んでいます。
今回は、株式会社人機一体 代表取締役社長 金岡博士にお話を伺いました。インタビュー当日は秘密基地で社員の皆さんにお迎えいただき、プレゼンに実演、最後はロボット操作体験と、大変ワクワクする時間を過ごさせていただきました。
子供の頃に誰もが一度は憧れた巨大ロボット。そんなロボットを自らの手で創り出したいと思っている方に必見のインタビューです。

代表取締役
金岡博士氏
株式会社人機一体 代表取締役社長 兼 立命館大学 総合科学技術研究機構 ロボティクス研究センター 客員教授。博士(工学)。発明家、起業家、時に武道も嗜む。専門はロボット制御工学。パワー増幅マスタスレーブシステム、歩行ロボット、飛行ロボット等を開発する。研究開発の傍ら、辛口のロボット技術論を吼えることがある。マンマシンシナジーエフェクタ(人間機械相乗効果器)という概念を独自に提唱し、あまり相手にされないながら十五年来一貫してその実装技術を研究・蓄積してきた。2015年に株式会社人機一体を立ち上げ、ビジネスとして「人型重機」の社会実装に挑む。
株式会社人機一体
https://www.jinki.jp/
- 設立
- 2007年10月
- 社員数
- 9名
《 Mission 》
先端ロボット工学技術の社会実装
《 事業分野 》
モビリティ・ロボティクス
《 事業内容 》
株式会社人機一体は、金岡博士の理念と先端ロボット制御工学をコアに、パワー増幅マスタスレーブシステムとしての「人型重機」を開発・社会実装することにより「あまねく世界からフィジカルな苦役を無用とする」ことを目指す 立命館大学発リアルテックスタートアップ です。
- 目次 -
- 1 「弱い自分」への恐怖から生まれた超人願望
- 2 博士課程からロボット工学専攻に
- 3 『産業用ロボット』と『ロボット工学が目指すロボット』との違い
- 4 東日本大震災で感じたロボットの無力さ
- 5 ロボットバトル参加で訪れた転機、そして『人機一体』として本格スタート
- 6 「巨人の肩の上に乗る」-先人の知恵から学ぶことで最善の経営を
- 7 初めての資金調達は、2014年のテレビ出演がきっかけ
- 8 人材採用はコネクションと強運をベースに
- 9 溢れるアイデアに開発スピードが追い付かないことが悩み
- 10 人機一体をハブとした新たなプラットフォームビジネスを展開中
- 11 新型コロナウイルスでロボットの重要性が広く知られるように
- 12 直近の課題は体制構築のためのリソース確保
- 13 先端ロボット工学技術の「凄さ」を理解し、その可視化に取り組んで欲しい
- 14 「フェアネス」という信条の下、自分の能力を最大限に活用できる環境
「弱い自分」への恐怖から生まれた超人願望
金岡博士の生い立ちについては、過去の記事などでもあまり触れられていませんが、記憶に残っている子供時代のお話など伺えますか?
幼少時の経験などで特筆すべきことはあまりありません。期待されるほど、ドラマティックな幼少期を過ごしてきたわけではありませんね。ただ、子供の頃から「弱い自分が社会で生きていくことへの恐怖」が強かったことを記憶しています。
誰しも生家や家族構成、ナショナリティ、社会の中の立ち位置など、生まれながらにして様々なものに縛られています。成長しても、人間として生きている以上、完全な自由など決してありません。私も、そこから出たくても出られない閉塞感や恐怖というものが絶えず心の片隅にあり、何とかしたいと思っていました。
たとえ勉強やスポーツなどで鍛えたところで人間としてできることには限界があるという現実に対しても同様に閉塞感と恐怖を感じていました。一方で、SFやマンガ、アニメなどでは巨大ロボットや超能力者が縦横無尽に活躍しています。なぜ自分はそうなれないのか、という妙なフラストレーションを抱えた子供だったと思います。
そういったジレンマを抱えつつも、成長するにつれて目の前のことに手一杯になってしまい、少なくとも学生時代までは、原体験としての「妙なフラストレーション」を忘れてしまっていました。しかし、思い起こせば、人のレンジを遥かに超えた強さを手に入れたいという超人願望は、子供の頃から常にあったのだと思います。だからこそ、学問を修めたいと思いましたし、武道を嗜むようにもなりました。でもやはり、そこには限界がある。
博士課程からロボット工学専攻に
大学に入学されて、ロボット工学を専攻されたのでしょうか?
いいえ、大学でも学部・修士までは化学工学専攻でした。化学工学は学問としては面白かったものの、卒業後に自分が石油化学プラントなどの仕事に就くことが、どうしても想像できませんでした。成績も良くなかったですし(笑)。
就職活動に迫られて初めて「今までやって来たことが無駄にならず、かつ自分が情熱を持って取り組めそうな分野」を探し始め、紆余曲折の後に、最終的にロボット工学に辿り着きました。化学工学の修士卒で就職するのを止め、ロボット工学で博士課程に進学することにしたのです。
化学工学からロボット工学への転向はレアケースだと思いますが、当時の化学工学・ロボット工学双方の恩師が寛容だったことや、博士課程にロボット人材が少なかったことなどが幸いし、運良く潜り込むことができました。ただ、入るのは良くても出るのは大変でした。機械・電気の素養がほとんどない状態でのロボット工学での博士課程ですから、人生で初めて真剣に勉強したと思います。博士論文は今考えても人生で一番の過酷さでしたね。
博士課程修了後は立命館大学の助手になられたということですが、この時代のエピソードなどお聞かせいただけますか?
立命館大学は日本で初めてロボティクス学科を作った大学であり、素晴らしい先生方が集まっていて、とても良い環境で仕事をすることができました。さらに立命館大学は、当時は稀だった産学連携を積極的に行う大学で、私も様々な企業に出向いて「一緒に共同研究をしませんか」と営業活動を行っていました。
そんな中で実際にビジネスの現場を見るうちに、そこでは我々のロボット工学が使えるような環境が全く整っていないことに気が付き、愕然としました。産業界で使われているロボット技術と我々が研究開発している先端ロボット工学技術には、ハードウェアもソフトウェアも、そもそもフィロソフィーの面でも大きな乖離があるという気付きは、今でも私のドライビングフォースになっています。
『産業用ロボット』と『ロボット工学が目指すロボット』との違い
そこの両者の乖離について、もう少し具体的に伺えますか?
これ(下図)は、我々の考え方でロボットをマッピングしたものです。縦軸は人の意思をロボットにどう伝達するかで分類しており、上半分はいわゆる「自動自律型」です。事前にプログラムを書いておき、そのプログラムどおりに動作をさせるという、産業用ロボットのほぼ全てを占める方法です。下半分は「操作操縦型」で、人がリアルタイムで操作することで、プログラムした以外の作業も臨機応変に行えるものです。人機社のコア技術であるマスタスレーブもこちらに属します。
横軸はロボットの制御方法による分類です。左側は「位置制御」と呼ばれるもので、産業用ロボットは、やはりほぼ全てこちらに該当します。位置制御では「手をここに置く」という動作は可能ですが、「何かに触る」といった外界の対象物が関わる動作は記述できません。一方、我々の目指すロボット制御は、右側の「力制御」という力学をベースにした制御方法です。力制御では、位置ではなく関節や手先にどのくらいの「力」を加えるかを制御します。位置制御では不可能だった外界とのインタラクションは、力制御の場合、非常に容易になります。人間や動物が筋肉に力を加えて行う動作も、すべてローレベルでは力制御です。
ロボット工学はこのマップ全体を網羅していますが、我々が重視する力学ベースの先端ロボット工学技術という視点では、右半分の「力制御」のエリアが本質です。左半分の「位置制御」エリアは一応用分野に過ぎません。しかし、社会実装されているロボットは、産業用ロボットを筆頭に「自動自律型・位置制御」という左上の狭いエリアにひしめき合っています。この左上のエリアは「指示できる作業は限られ、外界とのインタラクションが困難」という不自由なエリアであるにもかかわらず、です。
最近は、左上のエリア以外を目指すロボットベンチャーもありますが、それらも我々から見ると、左下の「操作操縦型・位置制御」か右上の「自動自律型・力制御」エリアにあります。左上のエリアと対照的に、もっとも応用範囲が広い「指示できる作業は限られず、外界とのインタラクションが容易」という自由なエリアである右下のエリアは、なぜか空白なのです。あえて言えば「重機」は右下エリアに属しますが、今の重機は、ロボットとして巧緻な制御をするには性能が不足しています。この空白を埋めるには不十分です。
このようなエリア間の断絶、空白という課題が、企業連携を進める中で浮かび上がってきました。そして、そういった問題意識が、人機社を起業するきっかけにもなりました。つまり、我々は、先端ロボット工学技術を活用し、右下の空白「操作操縦型・力制御」エリアを目指すことになります。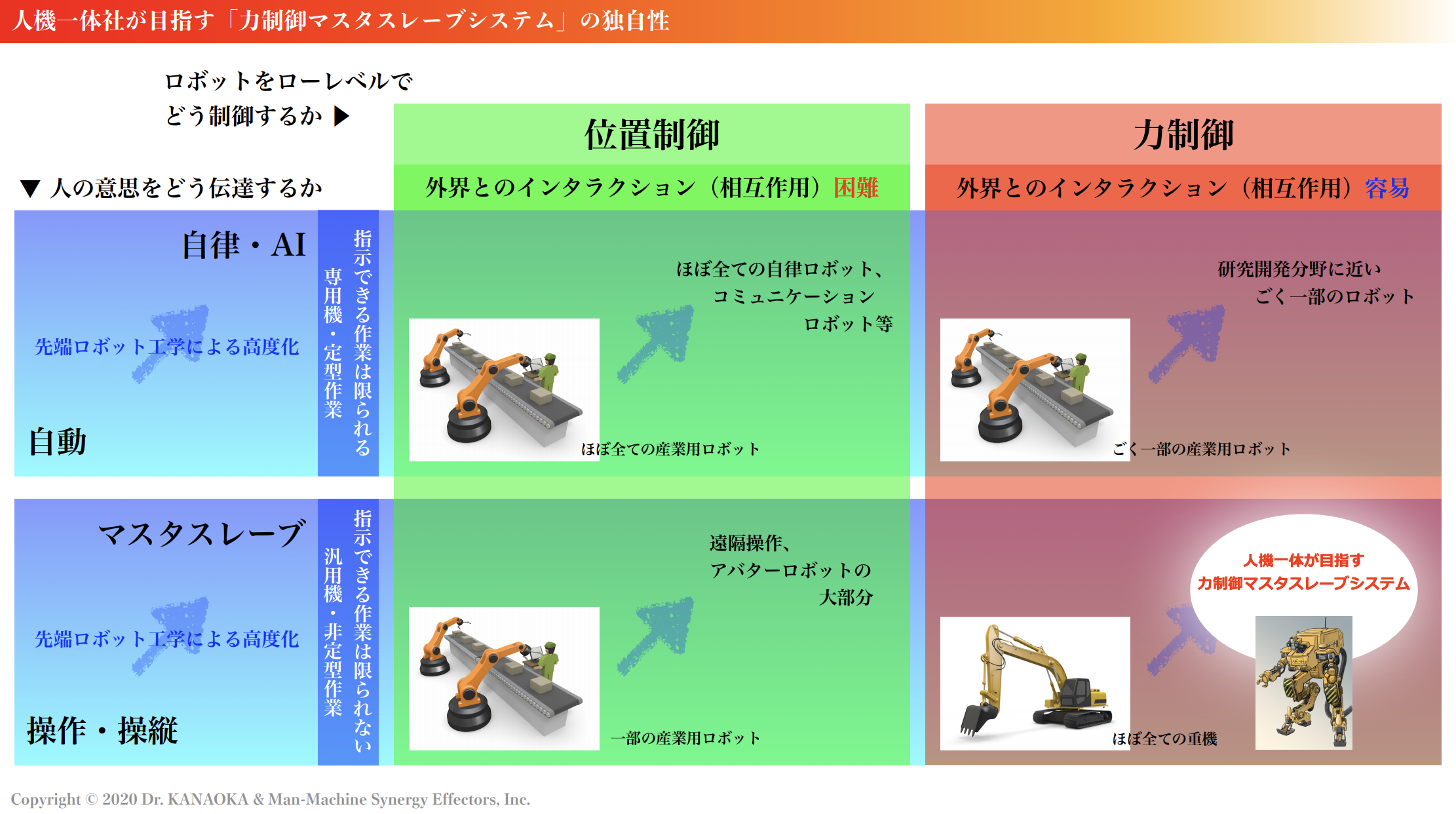
ロボットマッピング
東日本大震災で感じたロボットの無力さ
アカデミアの世界にいらした博士が起業をされるというのは大きな転換だったと思いますが、当時はどのようなお気持ちだったのでしょうか。
最初は「この技術で社会を変えたい」などという壮大な考えも明確なビジョンもなく、抱えていたフラストレーションを起業することで少しでも解消できれば、という思いからでした。起業した2007年当時は、いわゆる第三次ベンチャーブームの最後期で、国が補助金を出して大学発の起業を後押しする流れがあり、そこに乗って起業したというのが正直なところです。実際、2007年の起業から2015年に「株式会社人機一体」になるまでずっと私1人でしたし、特に利益を出そうとも思っておらず、損をしなければいい、という程度でした。
その8年間で印象に残っていることはありますか?人機一体に繋がる背景やエピソードがあれば是非お聞かせ下さい。
個人的には、ベンチャーが社会的には「相手にされていない」存在だと気付かされました。当時の「マンマシンシナジーエフェクタズ」社名義では、融資を受けるどころか、そもそも銀行口座を作れなかったり、ベンチャー社長の立場だとクレジットカードが作れなかったりしたのは衝撃的でした。当時はまだ大学教員という立場もあったので食い扶持に困るわけではありませんでしたが、創業翌年にリーマンショックがあり、第三次ベンチャーブームはあっさり終焉を迎えます。起業したのはいいものの、しばらくは手も足も出なかったというのが正直なところです。
そして、2011年3月11日に東日本大震災が発生しました。福島第一原発事故の現場で活躍を期待されていたロボットが実際には役に立たず、期待ほどの成果を出せませんでした。このような極限状態の現場において、我々に使えるロボットは何一つ無いというロボット工学技術の無力さと問題意識を強く感じた、屈辱的な出来事でした。
ロボットバトル参加で訪れた転機、そして『人機一体』として本格スタート
そんな中で私は大学とベンチャー企業双方の立場で、先端ロボット工学技術の研究開発を続けていましたが、2014年に転機がありました。
日本テレビの「ロボット日本一決定戦!リアルロボットバトル2014」というテレビ番組に出演することになり、明確なアウトプットが定められたプロジェクトベースのロボット開発に初めて取り組みました。テレビ局からも予算を頂きましたが、我々のチャレンジングな技術を導入したロボットを開発するのに必要な予算はその十倍。独自に資金を集め、特定のプロジェクトのために自分達の技術を期限までに形にするという、貴重な経験をさせていただきました。達成感もありましたが、それ以上に資金調達などを通じてビジネスの仕組みが見えてきたことが私にとっては大きかったです。
子供の頃からのフラストレーションや超人願望、研究してきた先端ロボット工学、2011年に感じた屈辱と無力感、それらが全て2014年の経験と結び付き、そこでようやく自分の中で「しっかりビジネスをやろう」という覚悟ができて、2015年に株式会社人機一体という形に結実しました。2007年の起業から時間が経ってしまいましたが、ここでやっと、本当のベンチャーとしてのスタートを切ることができました。ここからは、名実共に大学ではなくベンチャー企業「人機一体」が私の本業となります。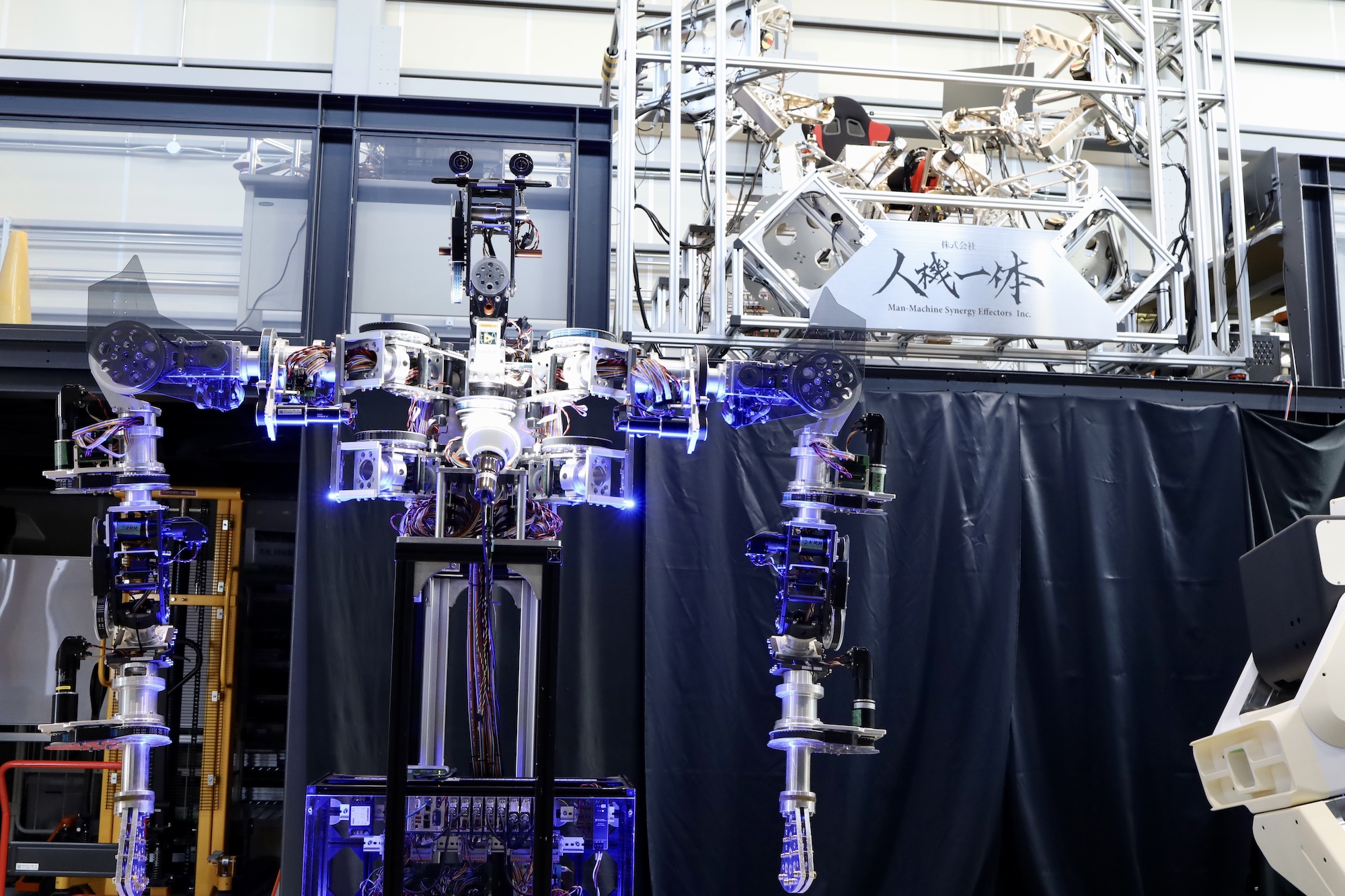
人機社の操縦型大型ロボット。画像右上は操縦席
「巨人の肩の上に乗る」-先人の知恵から学ぶことで最善の経営を
会社がパブリックなものに変化するに伴い、金岡博士も経営者としての意思決定が必要な場面が増えたと思います。どのようなことに悩まれ、どのように解決して壁を乗り越えていらしたのでしょうか。
もちろん日々悩みはあり、小さな壁にぶつかることも日常的ですが、まだ経営者として大きな壁を越えてきたわけではないと思います。深く考えるより、遠回りでも何でもとにかく行動し、小さな壁を何度も乗り越えることでまずはここまで来た、というところです。ネガティブな可能性には意識を向けず、「やるしかないのでやる」というスタンスです。
私は従業員に「巨人の肩の上に乗る」という言葉をよく使います。例えば、我々が現在開発している技術は100年前と比較すれば遥かに進歩していますが、それは我々が先人よりも優秀だからではなく、100年前から多くの人達が蓄積してきた技術が受け継がれてこそです。要は過去の巨人、つまり先人達の知識の積み重ねがあり、その肩の上に乗っているからこそ我々は巨人ではないけれども遠くを見渡すことができるということです。
ベンチャー経営も同様です。資金集めや仲間集め、信用問題など過去に同じようなことに苦しみ解決して来た経営者の経験から真摯に学び、その中で当たり前に良いと思われている方法を取るのが最善の道だというのが私の経営者としてのスタンスで、そこにクリエイティビティは必要ないと考えています。真摯な学びがあれば、我々は独自の技術やビジネスモデルなど、我々のミッションである「先端ロボット工学技術の社会実装」のために必要なところでほんの少しのクリエイティビティを発揮すれば良いのです。
初めての資金調達は、2014年のテレビ出演がきっかけ
資金調達について伺わせて下さい。開発費や人件費も発生しますが、当初はどのように資金を確保されたのでしょうか。
先ほどお話しした2014年のテレビ番組出演時に資金が必要になり、藁をも掴む思いで、リバネスの『テックプランター』という発掘プログラムに応募しました。そこでは賞は取れなかったのですが、丸さん(※現在、株式会社リバネス代表取締役、グループ CEO 丸幸弘氏)に興味を持っていただき、その翌年にリバネス社とユーグレナインベストメント社、SMBC日興証券社が立ち上げたリアルテックファンドから出資してもらったのが、人機社としての最初の資金調達です。それで会社としての体裁を整えて行きました。
ちなみに、リアルテックファンドからの出資はテレビ番組のロボット開発の後です。テレビ番組のロボット開発資金は、七転八倒しながら結局別の手段で調達しました(笑)。
人材採用はコネクションと強運をベースに
資金調達の次は採用かと思います。仲間集めはどのようになさってきたのでしょうか。
採用1人目は技術者だったのですが、彼は元々取引先メーカーの社員でした。2015年に参加したニコニコ超会議で本番前日にロボットが動かなくなるという緊急事態が発生し、急遽サポートに来てくれたのが彼でした。2人でほぼ徹夜で問題を解決して無事本番を迎え、その縁をきっかけに来てもらいました。採用経験もない、私一人の会社に来てもらうという最大のハードルを越えられた安堵感は大きかったです。
現在の採用は口コミや知り合いの紹介、展示会で興味を持ってくれた人など様々ですが、基本的にちょっとしたコネクションをきっかけにというケースが多いです。これは最大の利点かもしれませんが、私はとても運の良い人間で、アクセスすべきリソースが常に近くにあり、たまたま出会うという幸運に恵まれています。その後の技術者たちとの出会い、また人事・営業・広報を担当してもらっている諸岡との出会いもそうでした。
この秘密基地を建設した際の地主・スポンサーである、有限会社ユーアールの宇野様との出会いも本当にラッキーでした。地元の名士が「面白い会社」を探しておられるタイミングと、我々が工場建設の場所を探すタイミングが偶然重なり、引き合うように出会いました。彼の取り計らいで地元にもすんなりと根付くことができました。感謝してもしきれないほどです。
しかしながら、さすがに運(だけ)に頼るフェイズはもう止めなければと思っています(笑)。そろそろシステマティックに採用したいと考えており、現在、課題として取り組んでいます。
創業当初はテクノロジー至上主義で、工学者である私が経営や財務、営業、人事などを学ぶ価値はないのではと考えていたところがありましたが、実際に関わり始めると非常に深く面白いことが分かり、世界観が変わりました。当然ですが、これらも先人が必死でやって来たことであり、起業することで目を開かされたと思います。
滋賀県草津市にある人機社の本社「秘密基地人機一体」
溢れるアイデアに開発スピードが追い付かないことが悩み
技術開発では常に苦労をされているかもしれませんが、特にどういった場面でご苦労が多いですか?
実は、技術の研究開発自体に関しての悩みは全くありません。研究者時代は、開発した技術が社会的に有用であっても研究としての厳密性が論文としては重要であり、有用性と厳密性の狭間で、むしろもどかしい思いをしていました。ベンチャーにおける技術開発は社会実装が目的で、研究の世界ほど厳密性は求められません。特許にしても新規性と進歩性があれば(厳密性がなくても)認められます。ベンチャーは社会実装したもの勝ち。私にはこちらの世界の方が合っていると感じます。
こういう観点で研究開発をしていると新しいアイデアがいくらでも湧いてきて、そのスピードに試作のスピードが追い付かずアイデアが溢れかえっている状態です。私だけでもそうなのです。先端ロボット工学の分野全体を見れば、社会的に有用であっても活用されていないアイデアが山のように眠っています。
現在、人機社はこのようなアイデアを効率的に社会実装できる仕組みを作ろうとしています。その仕組みによって大量の技術を世に出せますし、我々としても特定の技術をプロダクトとして売るのではなく、社会実装するためのプラットフォームとしてビジネスを展開する方がメリットは大きい。仕組み化することで、複数の中長期的な社会課題を先端ロボット工学技術によって解決できると考えています。
人機一体をハブとした新たなプラットフォームビジネスを展開中
現在、ロボットについてはコンプライアンス的な問題や倫理的な問題など、事業を拡大する上で解決すべき問題があるかと思います。これらの問題に対してはどのようにお考えですか?その他、事業拡大に向けて取り組んでいらっしゃることがありましたらお聞かせ下さい。
確かに解決すべき問題は色々ありますが、コンプライアンスにせよ倫理にせよ、結局のところ我々だけでできることは少なく、どれだけ多くの人を巻き込んでその気にさせるかに尽きると考えています。
例えばロボットに公道を歩かせるには法整備等が必要になりますし、産業界も巻き込んでいかなければなりません。我々がやるべきは彼らに「面白くて儲かり、しかも社会に役立つ」と思ってもらい、我々のファンになってもらうことです。そのために、徐々に各方面にコネクションを作っているところです。
事業拡大については、現在新たなビジネスモデルが進行中です。人機社は製品を作ることに長けていないので、そこで頑張るのは戦略として違いますし、また製品を作れる人達を取り込むのも違うと考えています。むしろ外部の多くの企業と連携し、我々は基本的な独自コア技術提供とハブの役割を担い、そこに各社の得意分野で相互補完しながら複数のプロジェクトを並行させるビジネスモデル「人機プラットフォーム」を進めています。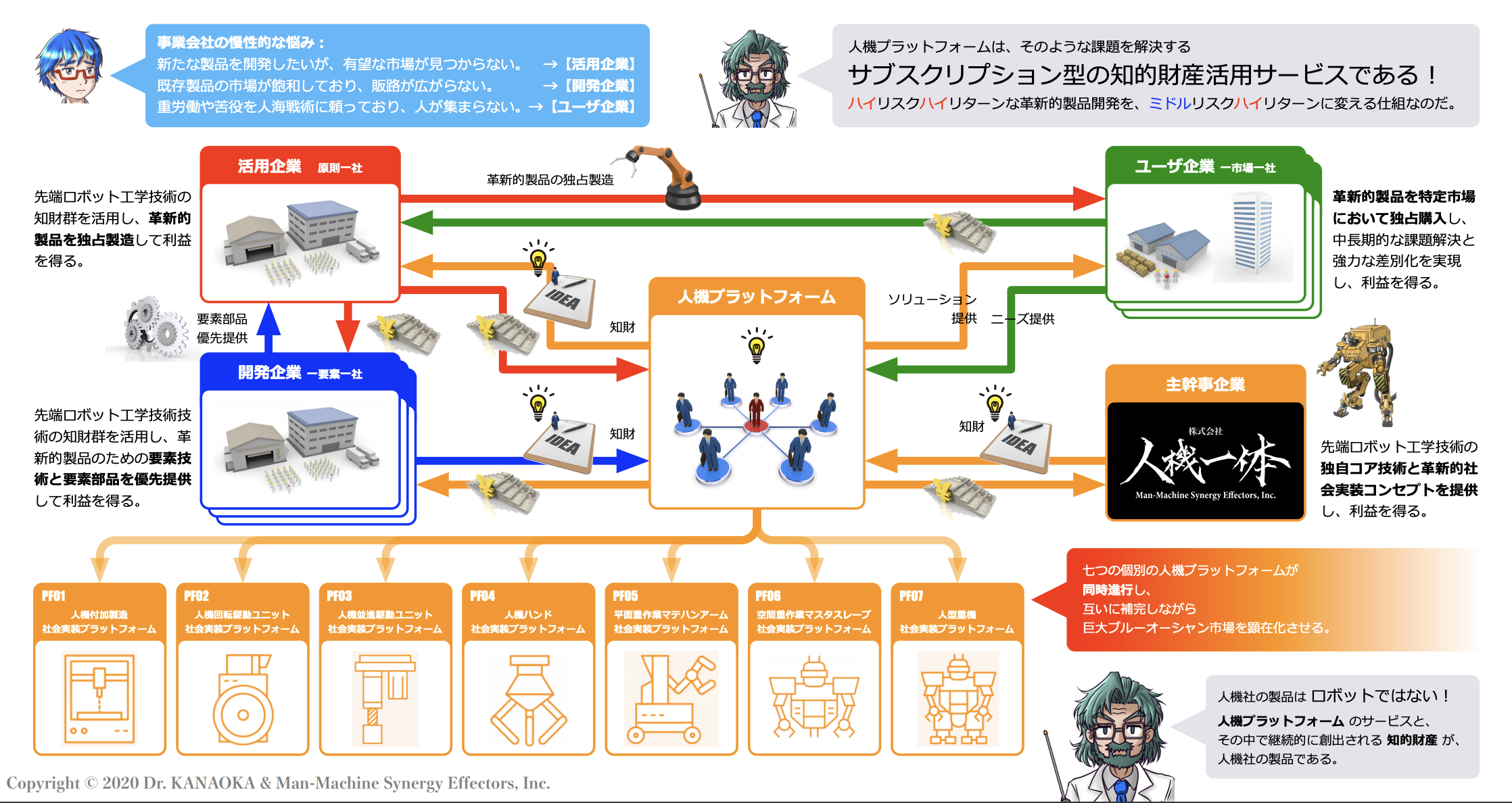
人機プラットフォーム概要図
新型コロナウイルスでロボットの重要性が広く知られるように
2020年は新型コロナウイルスの流行という予測不可能な事態となりました。この状況は御社にどのような影響がありましたか?
直撃を受けたわけではありませんが、短期的には、企業側マインドの冷え込み等から事業連携・資本連携が難しくなったり、社員が出社できなくなるといったことがあり、影響は小さくありません。業務のオンライン化、クラウド化は以前から進めており、社員の遠隔勤務は容易に実装できましたが、それでも確実に人機社の事業はスローダウンし、計画からの遅延が大きくなりました。
一方で、長期的視点においてはチャンスでもあると考えています。新型コロナウイルスの流行によりロボットの重要性が広く知られるようになりました。こんな状況だからこそ、「操作操縦型・力制御のロボット工学技術を道具として使うことで、フィジカルな苦役を無用とする」という我々のメッセージを深く理解していただけるのではと考えています。
直近の課題は体制構築のためのリソース確保
今後の課題についてもお聞かせいただけますか。今後、プラットフォームビジネス展開等にあたり、短期的・中長期的にどのような課題があるとお考えでしょうか。
課題はやはり人材と資金です。人機社には革新的な技術とアイデアが溢れている一方で、それを実現するリソースが十分ではないというのが根本的なボトルネックになっています。それを解決するには、とにかくリソースが必須です。
ただ、我々が目指すのは決して労働集約的なビジネスではないので、人を増やすことと売上の増加は比例関係にはありません。人を増やすのは、労働集約的な成長のためではなく、プラットフォームとして先端ロボット工学技術の社会実装を上流から下流まで網羅するのに必要な最低限の体制を構築するためです。それには「圧倒的に強い知財」と、その可視化が必要です。それができれば、自ずとビジネスはスケールしていきます。私は経営者として、リソースのボトルネックを解消し、ビジネスを加速しなければなりません。
先端ロボット工学技術の「凄さ」を理解し、その可視化に取り組んで欲しい
リソースを増やすことで、今後は組織マネジメントについてもさらに考えていく必要があります。金岡博士のお考えになる組織論や、求める人物像についてお聞かせいただけますか?
組織については、基本的に特別なものを作る必要はないと考えています。繰り返しになりますが、先人が作り上げてきた組織論を学び、踏襲し、当たり前のことを当たり前にやって、社員に「人機一体で働いて良かった」と思ってもらえるような働きやすい組織を構築することが経営者としての私の役目です。
人機社は、ロボットの本質はAIではなくフィジカルな実体・機能であり、またその機能は、人の苦役の解消に使われるべきだと考えています。もちろん我々もAIを利用しますし、コミュニケーションロボットが対話し、ペットロボットが癒しを提供することもロボットビジネスとしては重要だとも思います。しかし、それだけでは力学ベースの先端ロボット工学技術の「凄さ」を全く利用できていないとも考えています。
我々は、力学ベースの先端ロボット工学技術をビジネスとして社会実装し、人類を苦役から解放します。そのためには、先端ロボット工学技術の「凄さ」を十分理解し、それを実体として可視化することが必須です。人機社には、それができる人、それをやりたい人に、ぜひ来ていただきたいと考えています。
先端ロボット工学技術は、ある意味、魔法です。現実の物理世界に干渉し、物理法則を(破ることはできませんが、一定の制約のもとに)書き換えることができます。今これができるのは、おそらく先ほどのロボットマップ右下の「操作操縦型・力制御」エリアのロボットだけであり、このエリアでビジネスをしているのは人機社くらいですから、きっと楽しんでいただけると思います。我々自身、今、先端ロボット工学技術の「魔法」を社会実装できることにワクワクしかありません。
「ロボットを作りたい」と言う方の多くは「子供時代はガンダムに憧れた」と仰います。現在の産業用ロボットや家庭用ロボットはガンダムとは全く違います。もちろん人機社もガンダムを造るわけではありません。しかし、我々はなぜガンダムに憧れたのか。その本質を、大人として改めて実現したいと本気で思うならば、人機社は最適な環境を提供できるはずです。
「フェアネス」という信条の下、自分の能力を最大限に活用できる環境
金岡博士がお考えになる、これから御社に入社する魅力はどこにあるとお考えですか?
既に述べたように、先端ロボット工学技術の「凄さ」を自ら体現し、社会実装することで技術的にもビジネス的にも会社と共に成長し、自己実現できることです。大企業とは異なり、配属に関係なく人機社には「ロボット」以外の仕事はありません。「本物のロボットの可視化と社会実装」に思う存分取り組めることが最大の魅力だと自信を持っています。
私はよく社員に「平等と公平は違う」と話すのですが、「フェアネス(=公平)」という基本理念のもと、どの社員にも公平にチャンスが与えられるという体制を作っています。ベンチャーなので多忙ですし何でもしなければなりませんが、ことロボットに関しては、先端ロボット工学の社会実装におけるあらゆる面に関わる「ロボット工学のフルスタックエンジニア」として、自分の能力を最大限に活用できる環境は整っていると思います。先端の3Dプリンタや加工機、CADやシミュレーションソフトウェアも使い放題です。
あと、植物工場を社内に備え、レタスは食べ放題です(笑)。ロボットという人工的なものをやっていることもあり、敷地内に小さな畑を作って野菜や花を育てています。そこは滋賀ならではですね。機械やコンピュータと向かい合った後は、畑で優しい自然と触れ合う。そんな緩急を皆で楽しみながら働いています。
私も先ほど植物工場を拝見し、驚いたところです。今回は工場見学やロボット操縦体験までさせていただき、子供時代に戻ったような気持ちになりました。どうもありがとうございました。

株式会社人機一体
https://www.jinki.jp/
- 設立
- 2007年10月
- 社員数
- 9名
《 Mission 》
先端ロボット工学技術の社会実装
《 事業分野 》
モビリティ・ロボティクス
《 事業内容 》
株式会社人機一体は、金岡博士の理念と先端ロボット制御工学をコアに、パワー増幅マスタスレーブシステムとしての「人型重機」を開発・社会実装することにより「あまねく世界からフィジカルな苦役を無用とする」ことを目指す 立命館大学発リアルテックスタートアップ です。